
A tervező neve
Kategória
A gép funkciója
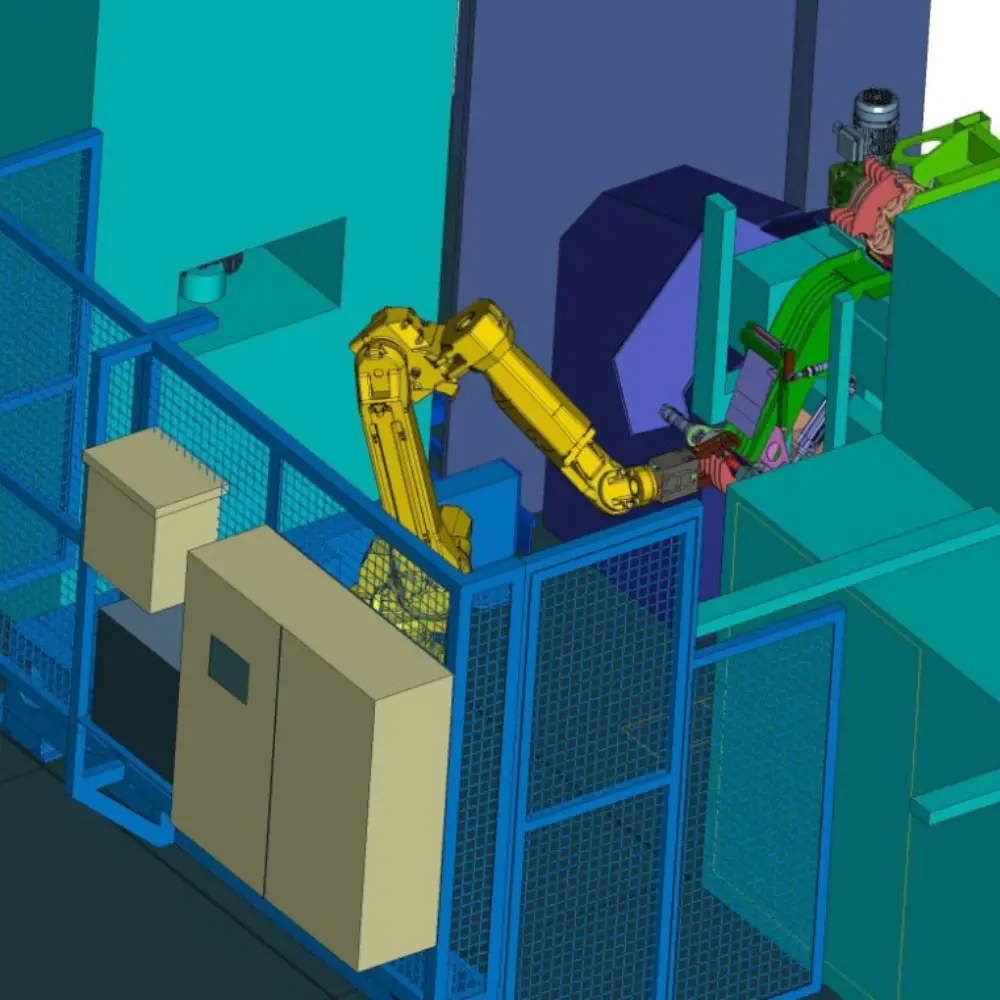
Korábban kézi kiszolgálású kovácsprés anyagmozgatási feladatait ipari robot és manipulátor alkalmazásával oldottuk meg. A független működésmódú indukcós kemencéből érkező hevített előgyártmányok ellenőrzését és szükséges tájolási pontosságú adagolását biztosítja a robot a kovácsprés szerszámfelei közé. A kovácsolt darab elvételét az általunk fejlesztett nehézüzemi manipulátor végzi.
Mitől más ez a gép, mint a többi hasonló ipari megoldás?
A nehézipari körülmények fokozottan szennyezett és nagy hőterhelésű környezetet eredményeznek. A robot rendszerintegrációja és a manipulátor megtervezése során a több mint 1000 fokos előgyártmányok kezeléséhez aktív, passzív és vezérelt hővédelmi továbbá alkalmazástechnikai megoldásokat valósítottunk meg a berendezések hosszú idejű használata érdekében.
Milyen ipari igény hívta életre a gépet, milyen problémát old meg?
A megterhelő és alapvetően veszélyes humánerős gépkiszolgálást váltottuk ki robotizációval, egyben a megmunkálási pontosság is javult a tájolásra érzékenyebb gyártmányok esetében, a szubjektív faktor kiiktatásával.